

New paper from Ross-Hatsopoulos Lab Collaboration
Multiple regions of primate orofacial sensorimotor cortex encode bite force and gape.
This paper just out from the Ross-Hatsopoulos collaboration funded by R01 “Neuroplasticity and the role of sensorimotor cortex in control of orofacial function”. R01DE023816-01.
Ross-Hatsopoulos Lab paper
Robust cortical encoding of 3D tongue shape during feeding in macaques
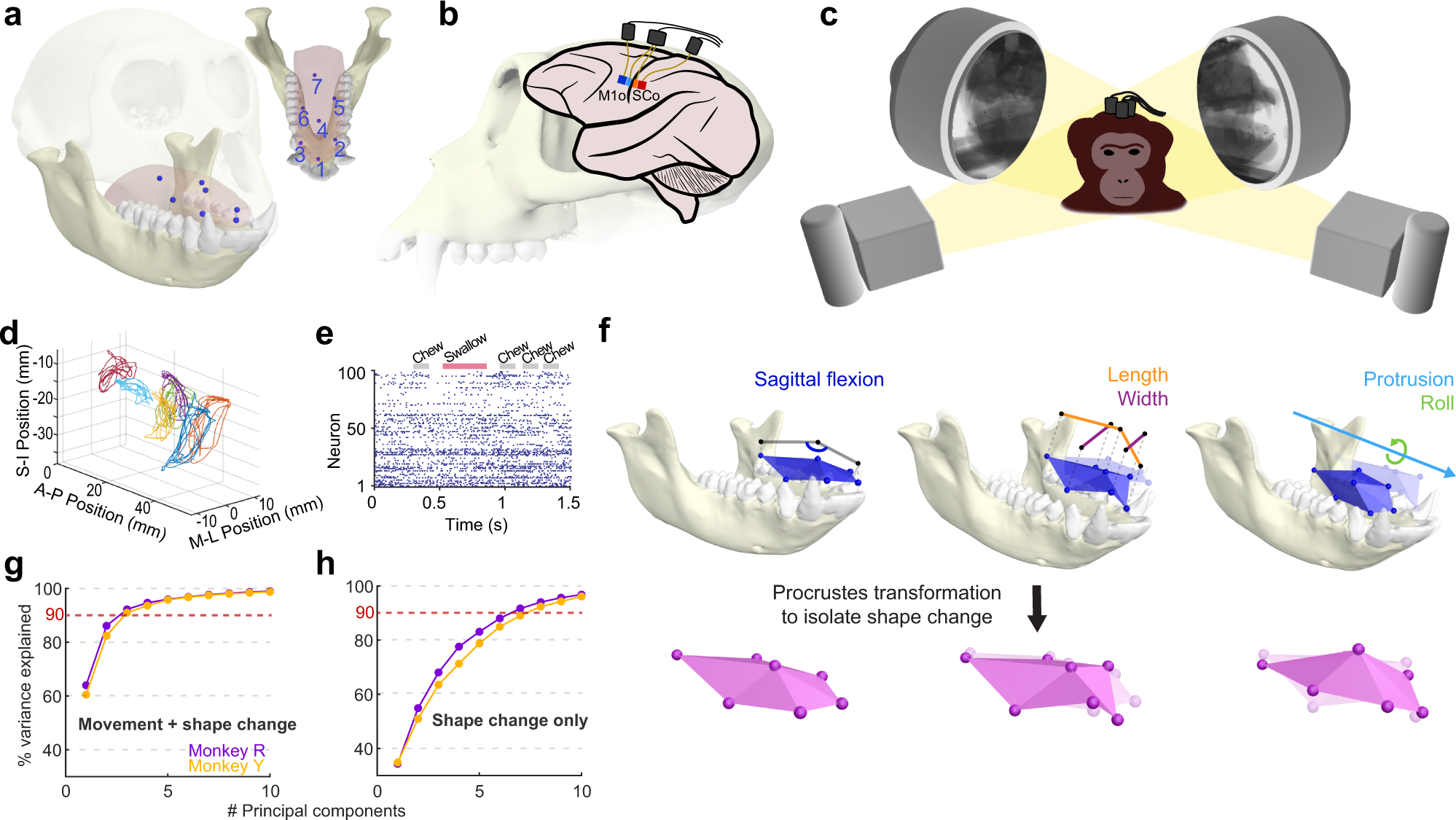
This new paper from the long-standing Ross-Hatsopoulos Lab collaboration was based on JD Laurence-Chasen’s dissertation. This is the first evidence that the brain encodes shape dynamics of a muscular soft-body. Great work, JD!

Neural control of orofacial function
The Hatsopoulous and Ross Labs at the University of Chicago, pioneered the simultaneous recording of 3D jaw and tongue kinematics using XROMM and activity in populations of neurons in the orofacial sensorimotor cortex using multi-electrode arrays. These data are providing new insights into cortical control of orofacial function, including bite force, gape, and jaw and tongue movements. We are currently comparing grasping and biting behaviors to determine whether the same cortical control mechanisms are used in the two systems.

Evolution of rhythmic behaviors
Cyclic vertebrate behaviors vary in their degree of rhythmicity–the degree if variation in cycle duration. The distribution of variation in rhythmicity provides insight into the evolution of neuromechanical systems. Starting with work with Anthony Herrel comparing chewing rhythmicity in mammals and lizards, we have worked with Nicolai Konow on chewing rhythmicity in fishes, and with Michael Granatosky on locomotor rhythmicity in mammals and birds, and on the role of dynamic instability in triggering gait transitions in tetrapods. There is good evidence that rhythmicity varies across clades of vertebrates, that it may be related to the evolution of proprioceptors.

Feeding versus locomotion
Many evolutionary studies use comparisons within feeding or locomotor systems to test hypotheses about the evolution of neuromechanical systems. In collaboration with Michael Granatosky, we have been comparing the biomechanics of feeding and locomotor systems to investigate form-function relationships in musculoskeletal systems. We have shown that joint angular excursions during cyclic behaviors – chewing, walking and running – differ between feeding and locomotor systems, reflecting variation in the functional optimality criteria governing the evolution of the systems. This pattern in jaw- and limb-joint excursions may be related to variation to the evolution of disparity during tetrapod evolution.
